Vehicle-Detection
Vehicle-Detection
Detect vehicles in a video feed.
The goals / steps of this project are the following:
- Perform a Histogram of Oriented Gradients (HOG) feature extraction on a labeled training set of images and train a classifier Linear SVM classifier
- Optionally, you can also apply a color transform and append binned color features, as well as histograms of color, to your HOG feature vector.
- Note: for those first two steps don’t forget to normalize your features and randomize a selection for training and testing.
- Implement a sliding-window technique and use your trained classifier to search for vehicles in images.
- Run your pipeline on a video stream (start with the test_video.mp4 and later implement on full project_video.mp4) and create a heat map of recurring detections frame by frame to reject outliers and follow detected vehicles.
-
Estimate a bounding box for vehicles detected.
Code files description:
- helper_functions.py has functions defined to reduce the code of other files.
-
hog_test.py extracts hog, spatial, hist features & outputs the visualization of it.
Histogram of Oriented Gradients (HOG)
1. HOG features extraction:
single_img_features function in helper_fuctions.py provides the code for the feature extraction.
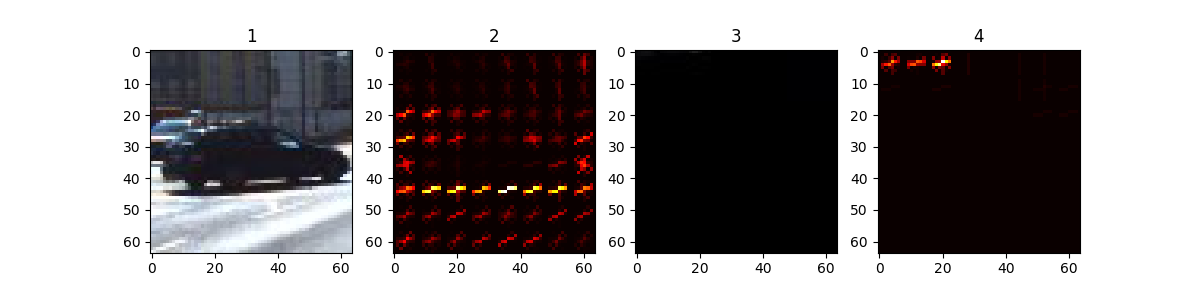
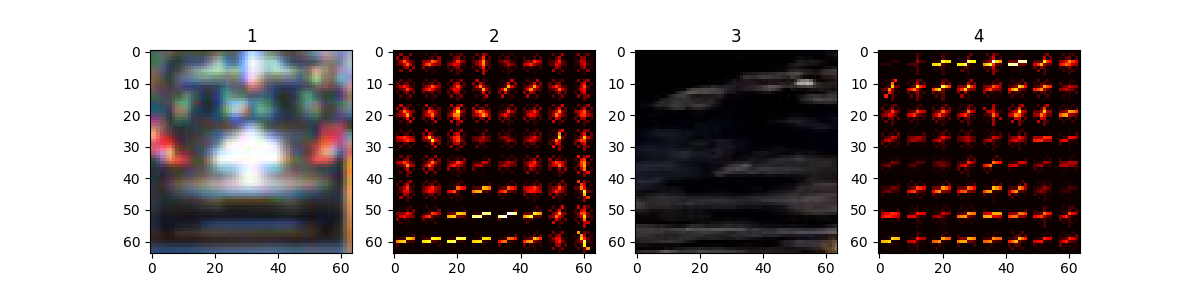
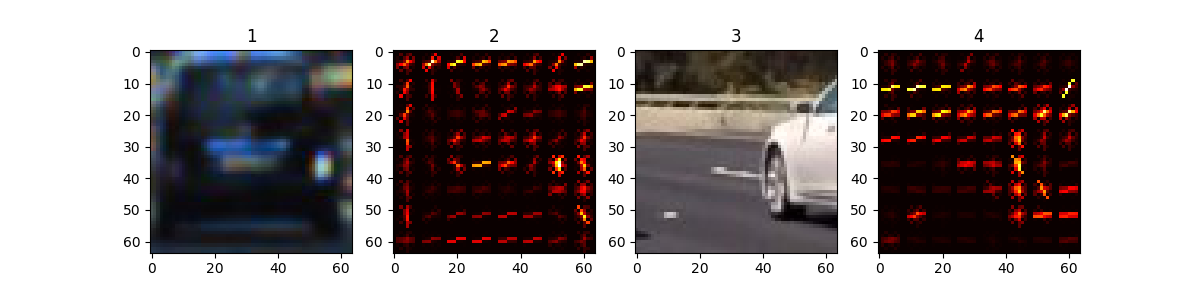
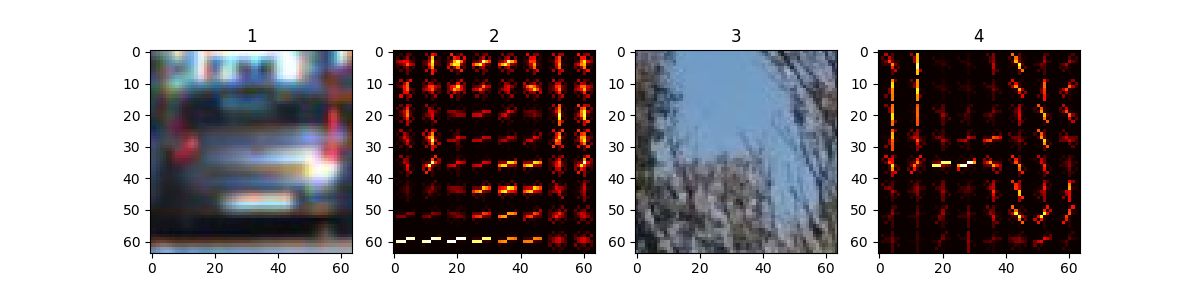
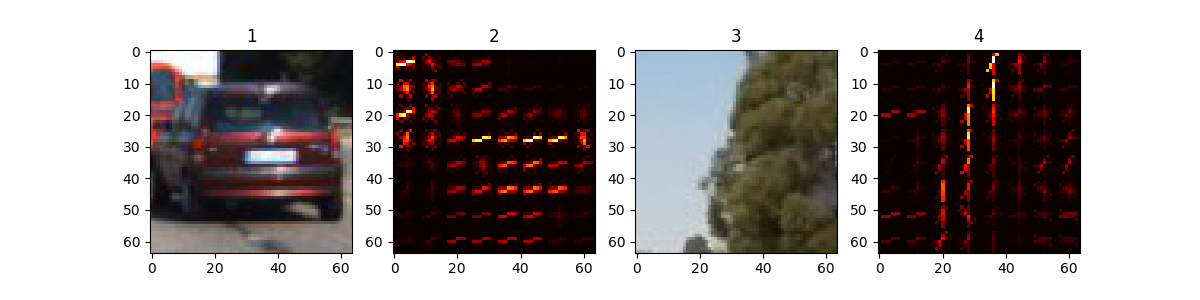
I started by exploring different color spaces and different skimage.hog() parameters (orientations, pixels_per_cell, and cells_per_block). I grabbed random images from each of the two classes and displayed them to get a feel for what the skimage.hog() output looks like.
Here are the output images with HOG parameters of ‘orient = 9’, ‘pix_per_cell = 8’, ‘cell_per_block = 2’, ‘hog_channel = 1’, ‘spatial_size = (4, 4)’, ‘hist_bins = 32’:
‘HSL’ Colorspace:
 ‘HSV’ Colorspace:
‘HSV’ Colorspace:
 ‘RGB’ Colorspace:
‘RGB’ Colorspace:
 ‘YCrCb’ Colorspace:
‘YCrCb’ Colorspace:
 ‘YUV’ Colorspace:
‘YUV’ Colorspace:
2. Why I settled on the final choice of HOG parameters:
I tried various combinations of parameters and tried plotting histogram features for many random images for both car and non-car caterogy. Finally, the chosen parameters gave distinctictive results and better accuracy than other.
For colorspace, YCrCb and YUV were giving good results. So, I proceeded with YUV at first.
3. How I trained a classifier using selected features:
I started with extracting 3000 random car & noncar images for spatial, color and hog features. Then, I normalized the features and splitted them to train and test features with ratio of 0.9:0.1. Then, I trained it with LinearSVC.
Sliding Window Search
1. How I implemented a sliding window search:
I decided to search the image for vehicle in Y range of [400, 720] and complete X range, because all of the vehicles appear in that region. Upper region in Y axis is filled with trees/skies. I started with window size of 64 for selected region.
I tried to reduce false positives by adding heat threshold of 5.
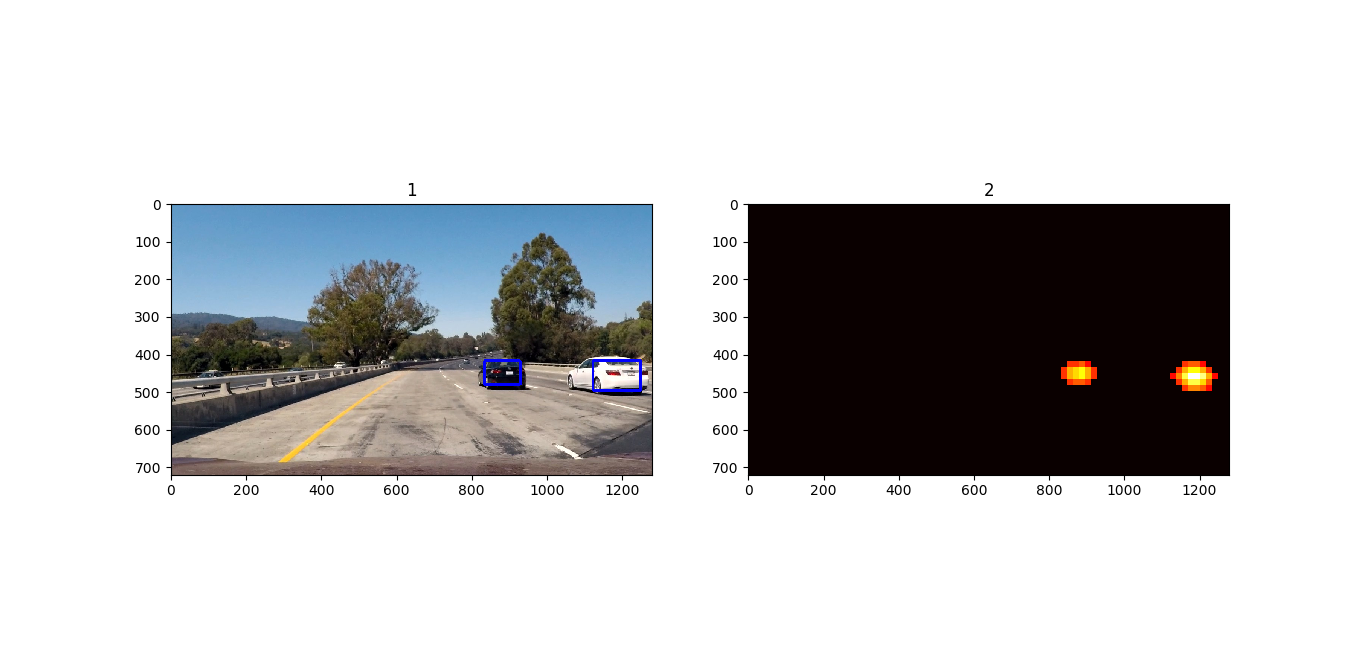
2. How I decided what scales to search and how much to overlap windows:
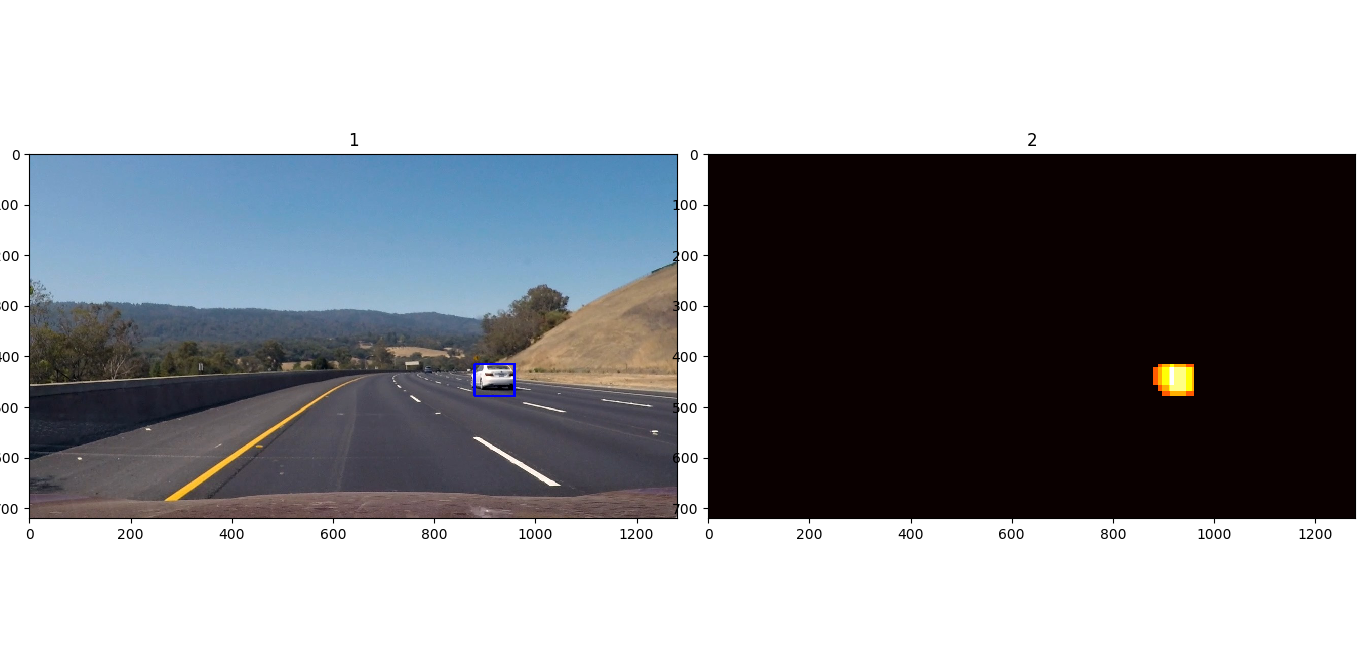
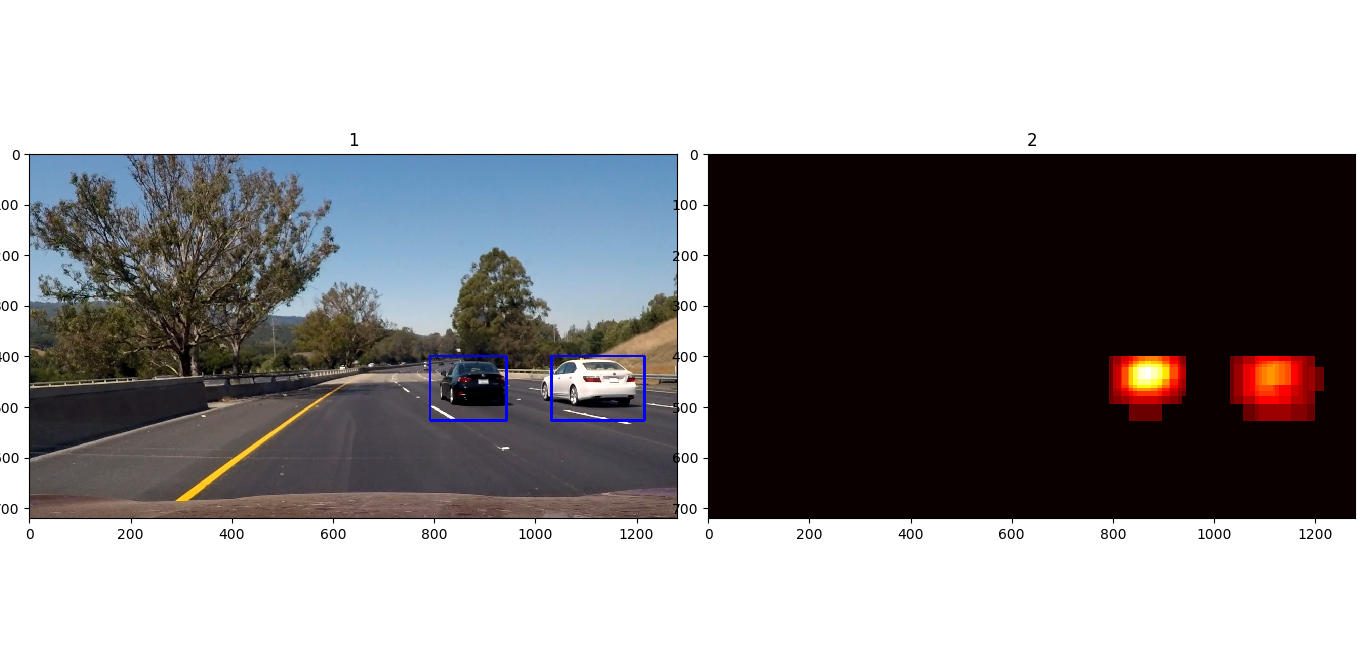
Using parameters, scale = 1, heat_threshold = 5, window = 64, samples=8500, colorspace='YUV'. I got following image detection output:
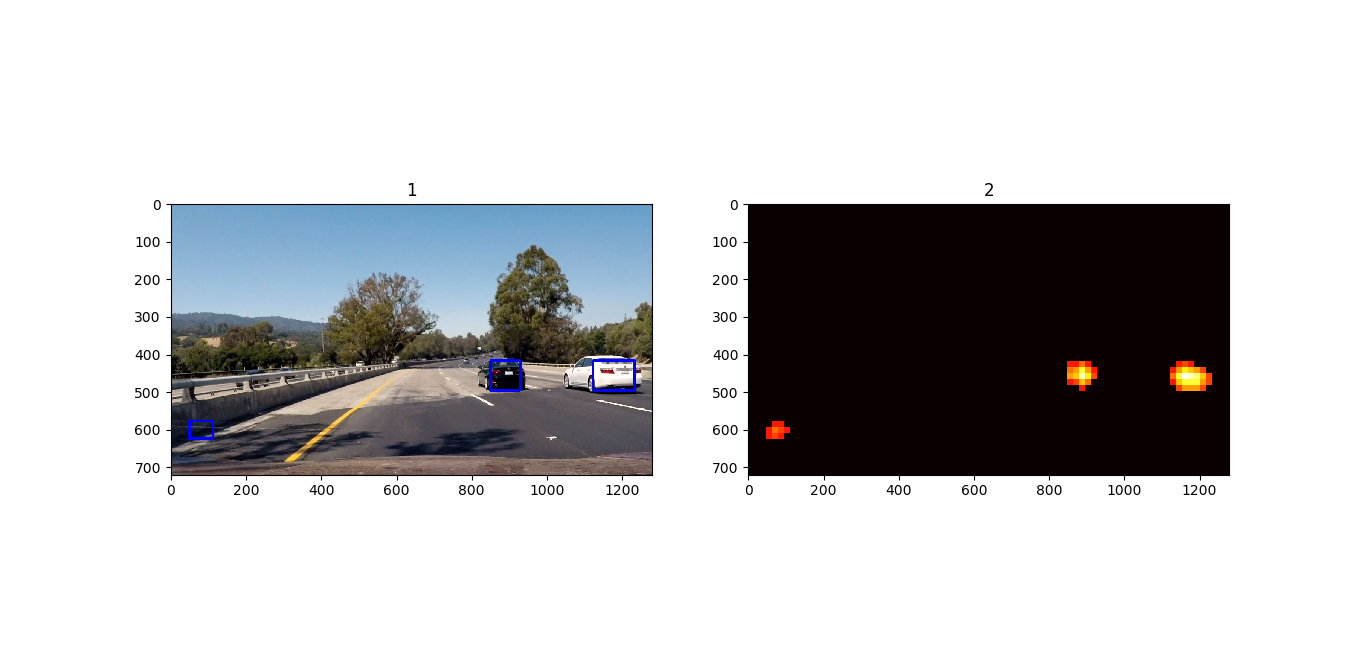
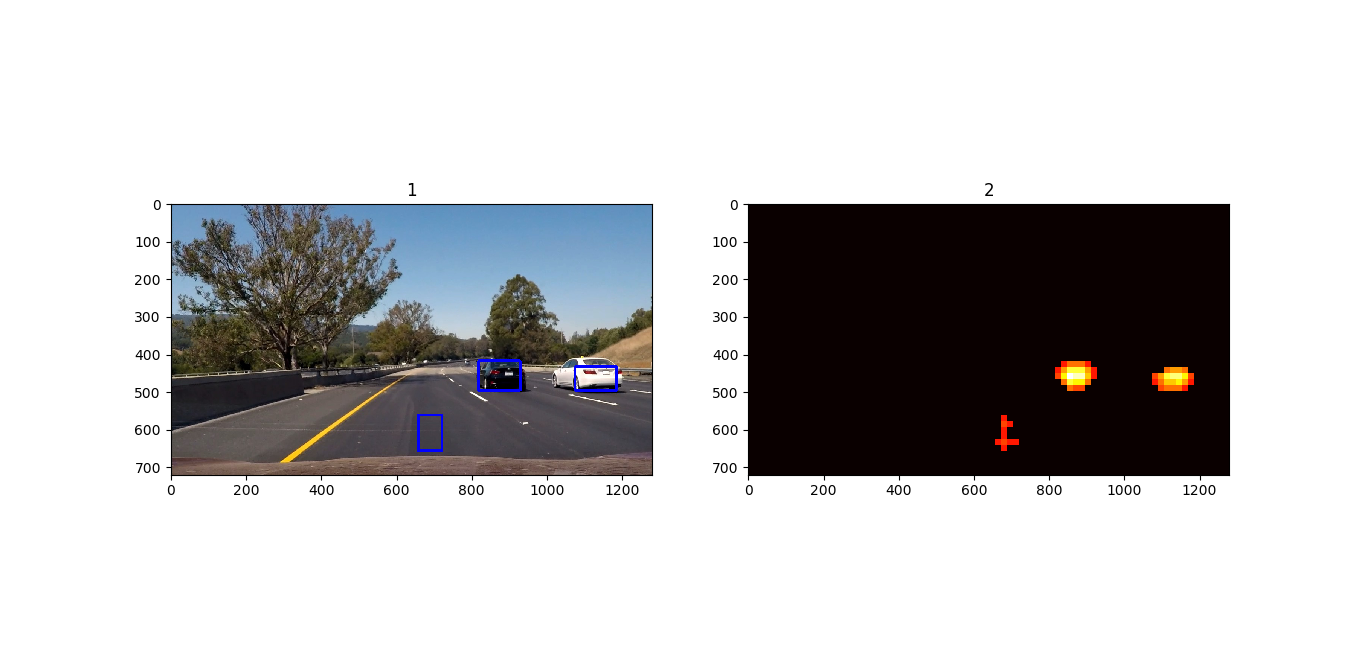
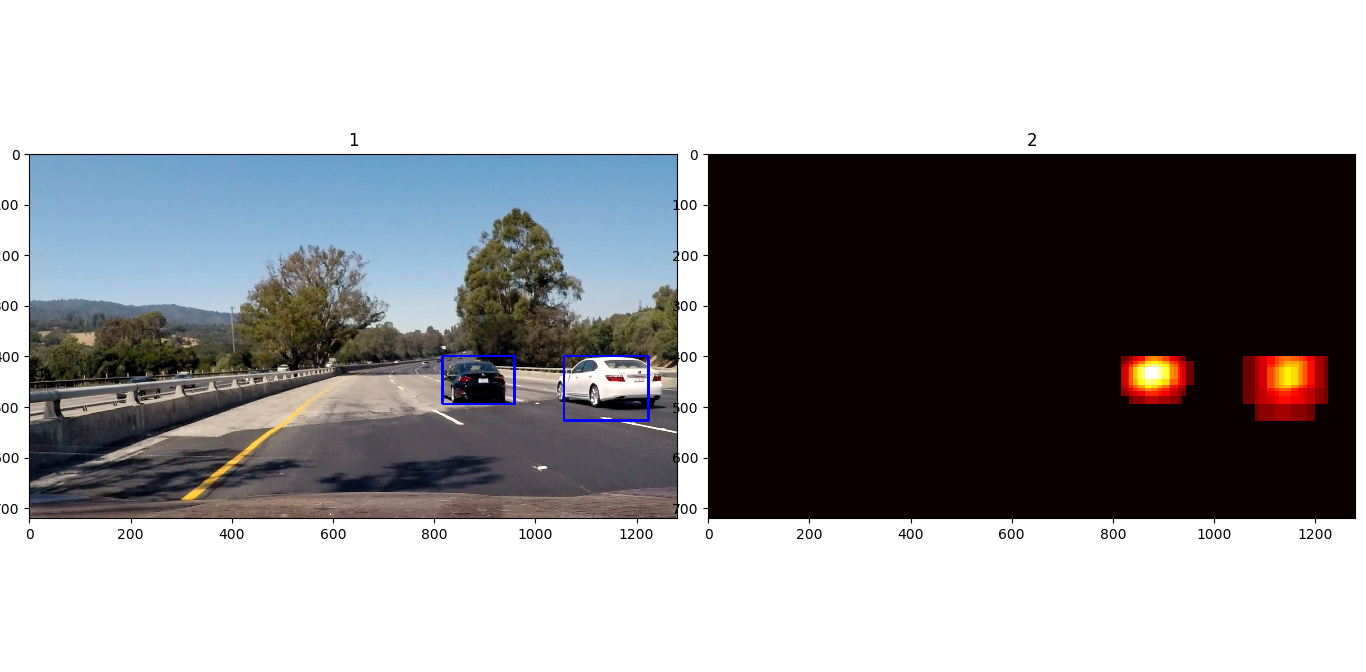
As it was getting few false positives, I tried changing colorspace to 'YCrCb'. It had no false positives in test image detection. The output is:
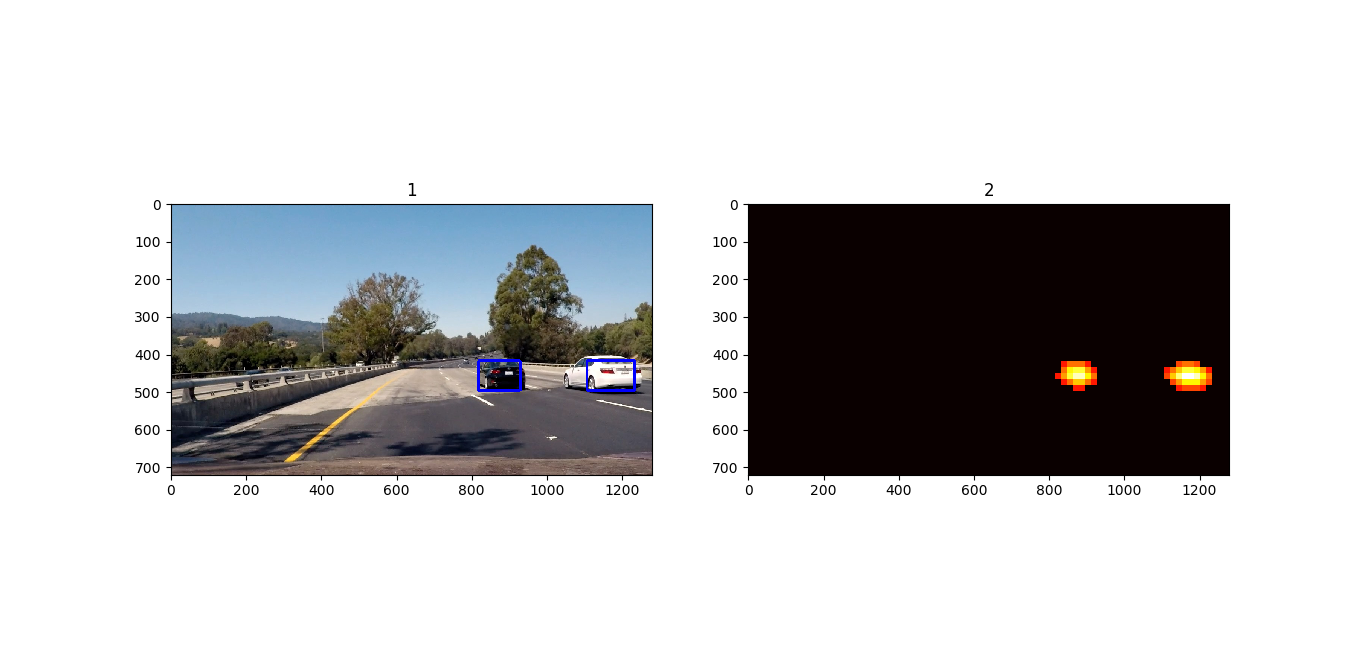
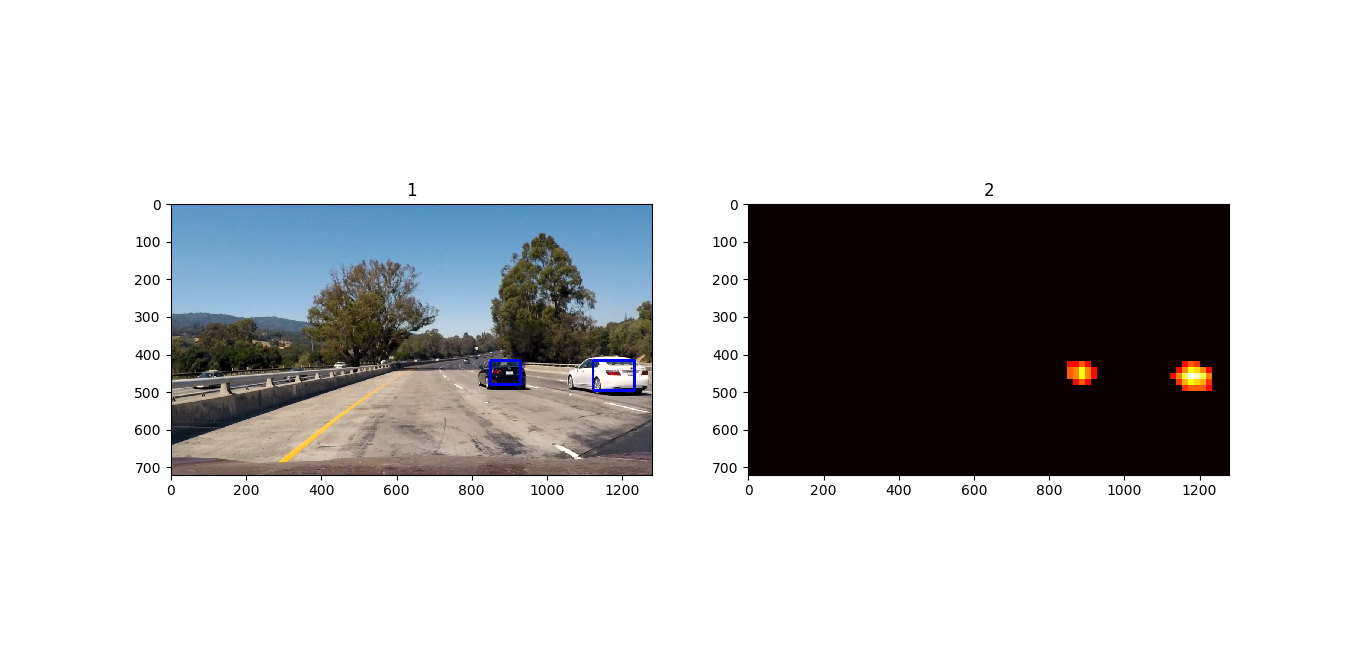
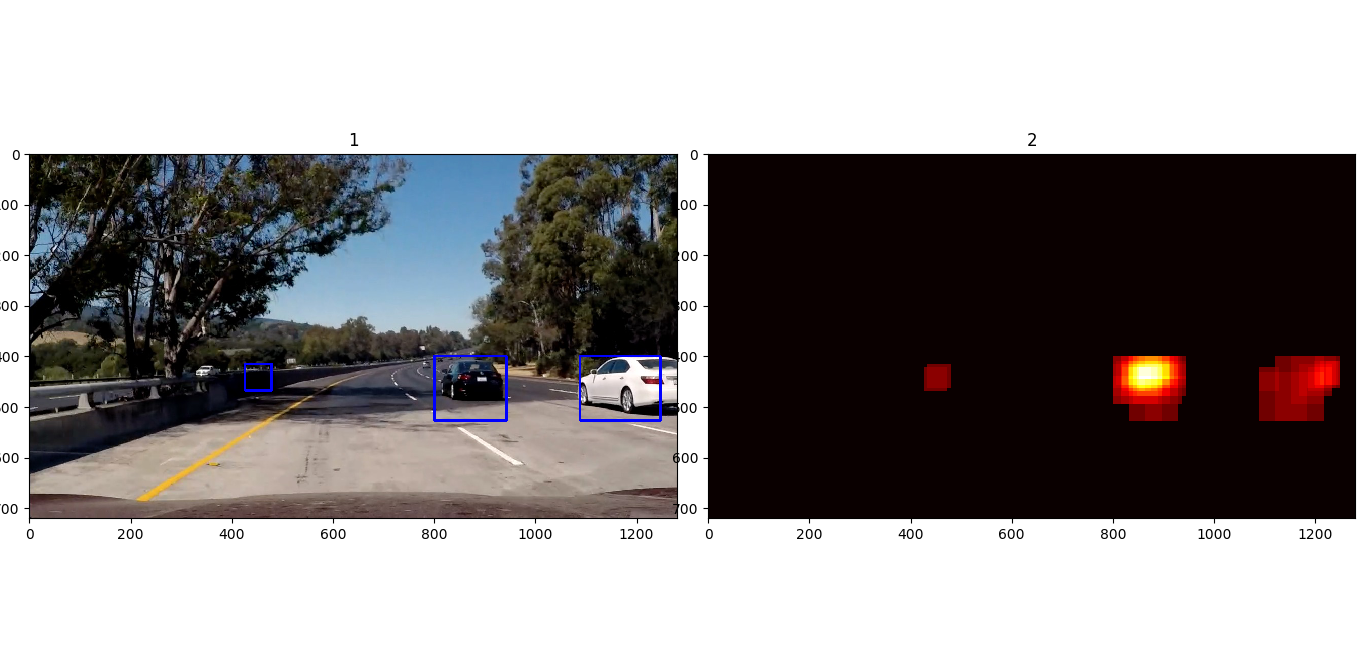
3. Examples of test images to demonstrate how your pipeline is working:
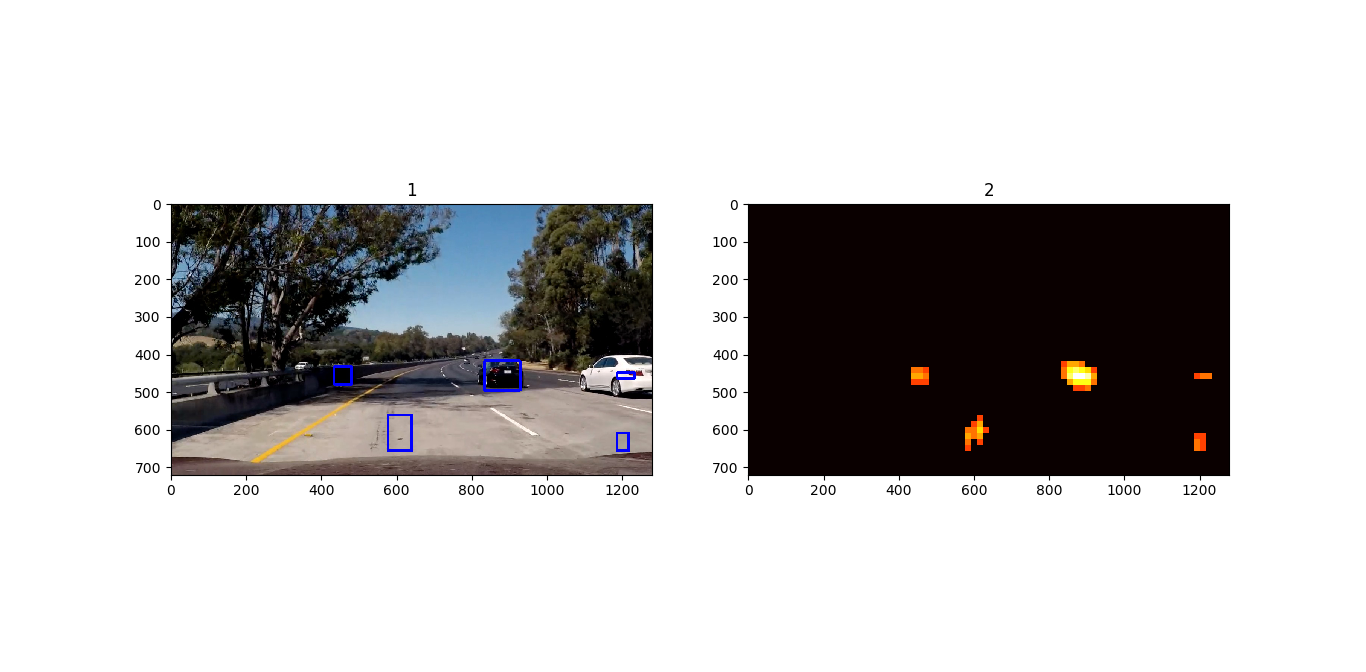
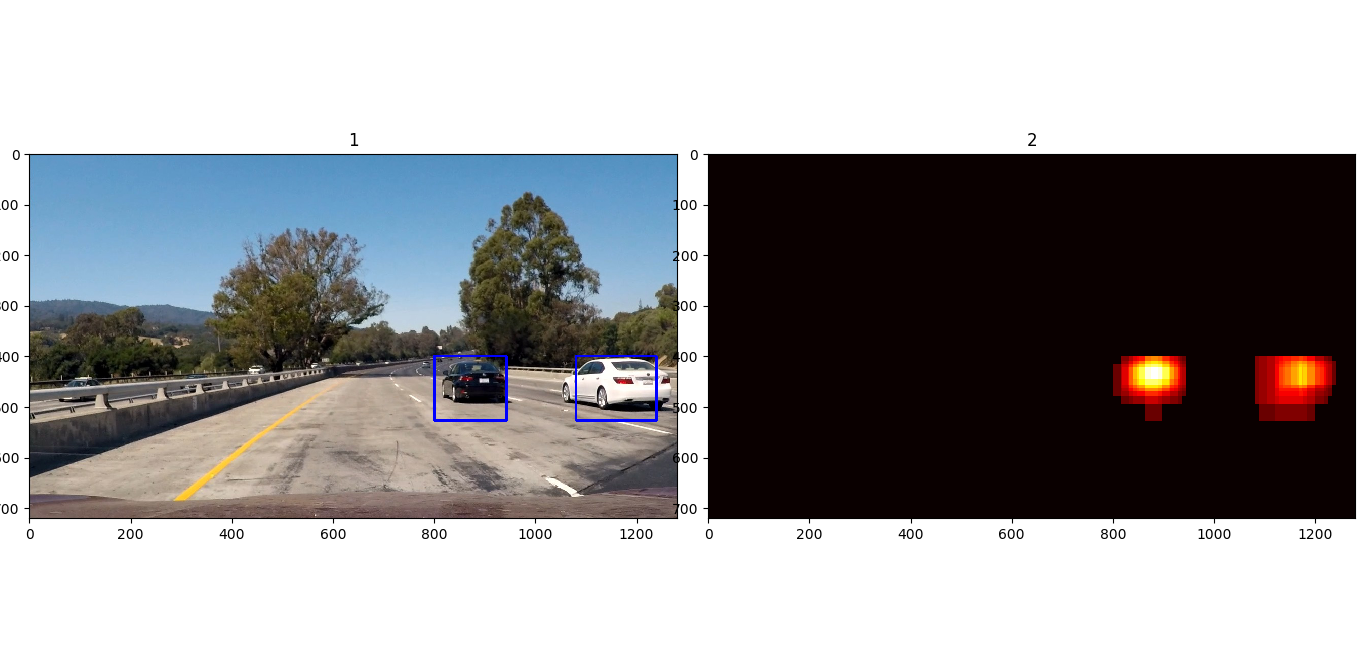
Upon modifying parameters to:
ystart = 400,
ystops = [486, 502, 534, 646, 646],
scales = [0.72, 1, 1.5, 2, 2.5],
heat_threshold = 3,
window = 64.
I get following output:
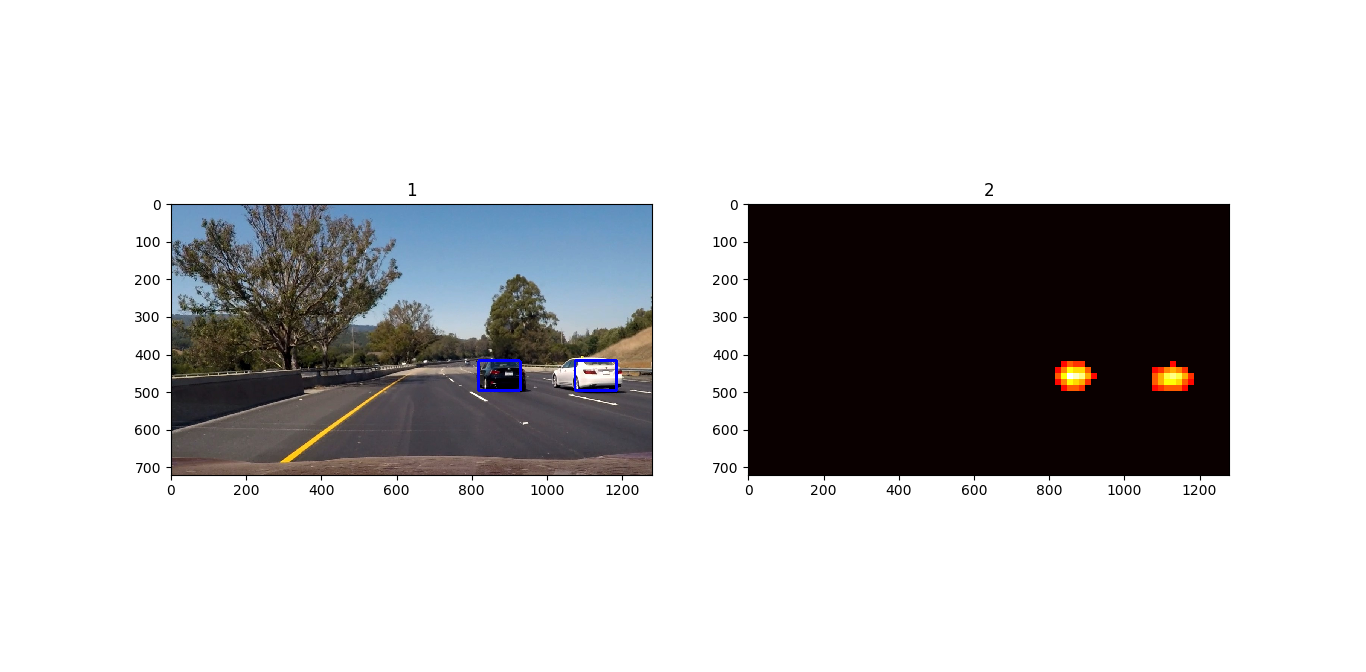
4. What did I do to optimize the performance of your classifier:
I used multiple windows to get more accurate detection as possible & added the threshold of 3 to remove the false detection.
scales = [0.72, 1, 1.5, 2, 2.5],
heat_threshold = 3
Video Implementation
1. Link to my final video output:
Here’s a link to test video result & link to project video result
2. How I filtered false positives and implemented combination of overlapping bounding boxes:
I used the method as in image detection to filter the false positives with combining overlapping bounding windows in single frame with threshold of 6.
Discussion
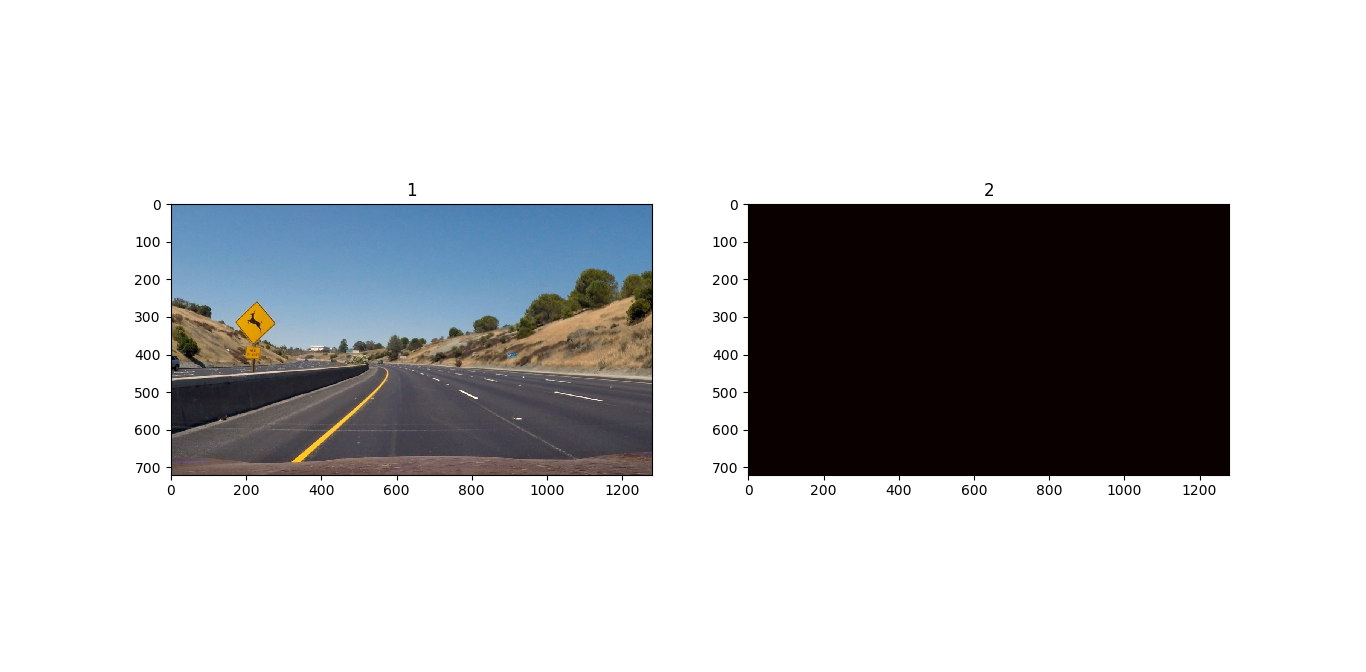
Problems/issues I faced in the implementation of this project:
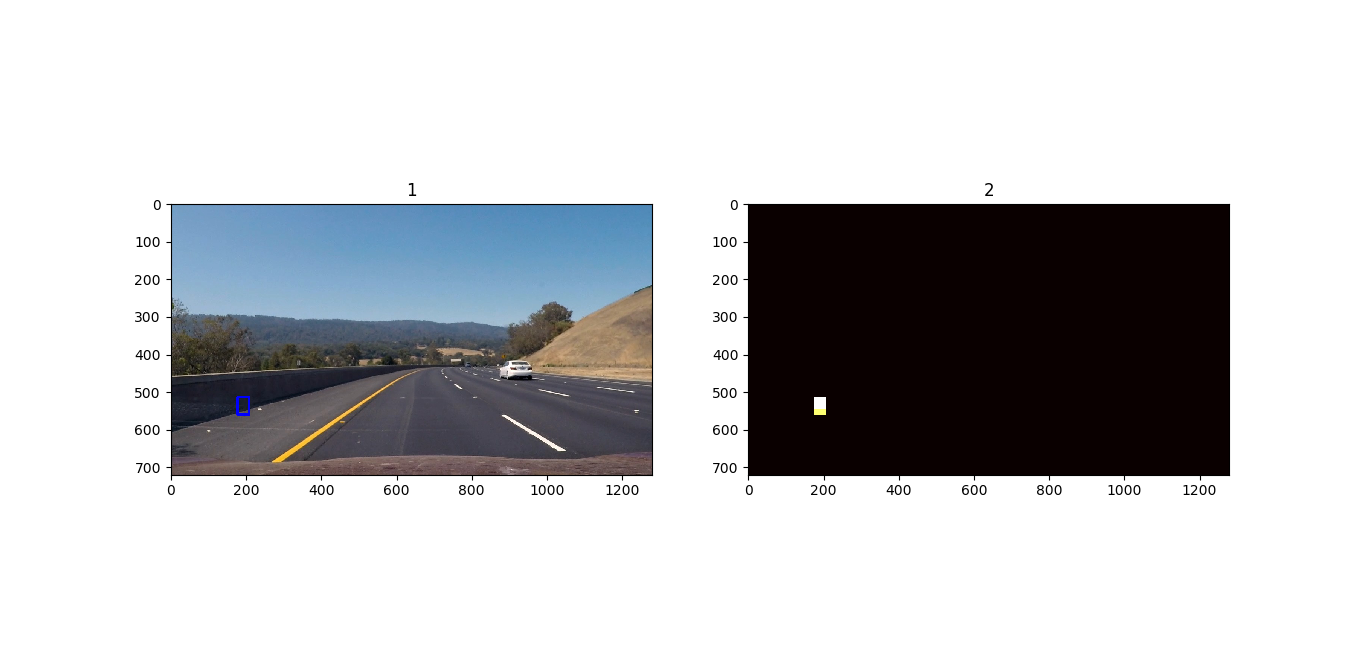
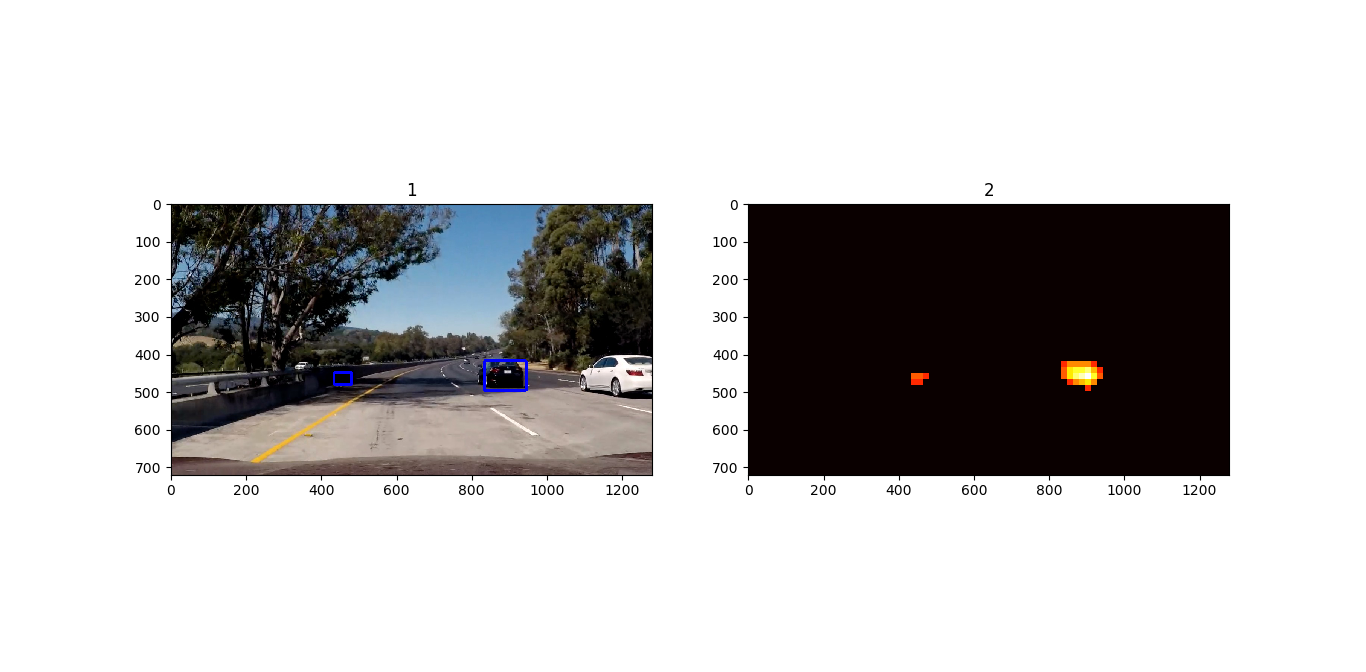
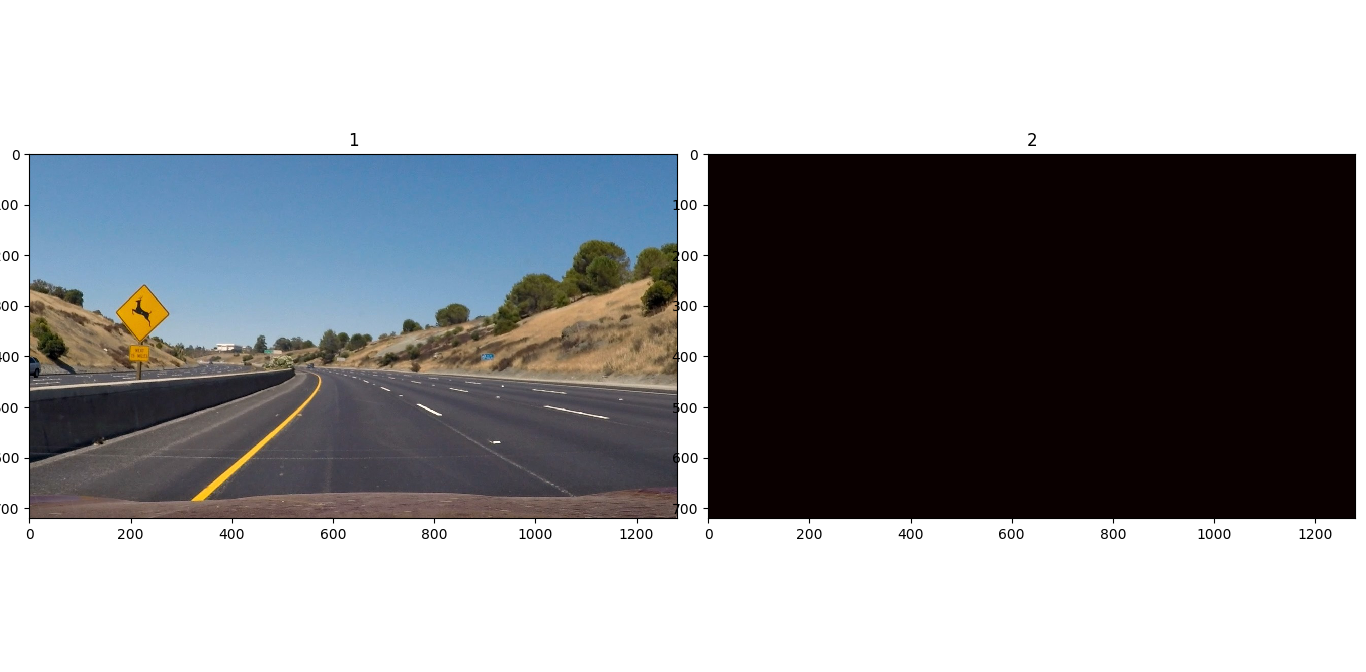
Getting detected one particular vehicle in image was a big problem. Here, the image with that vehicle:
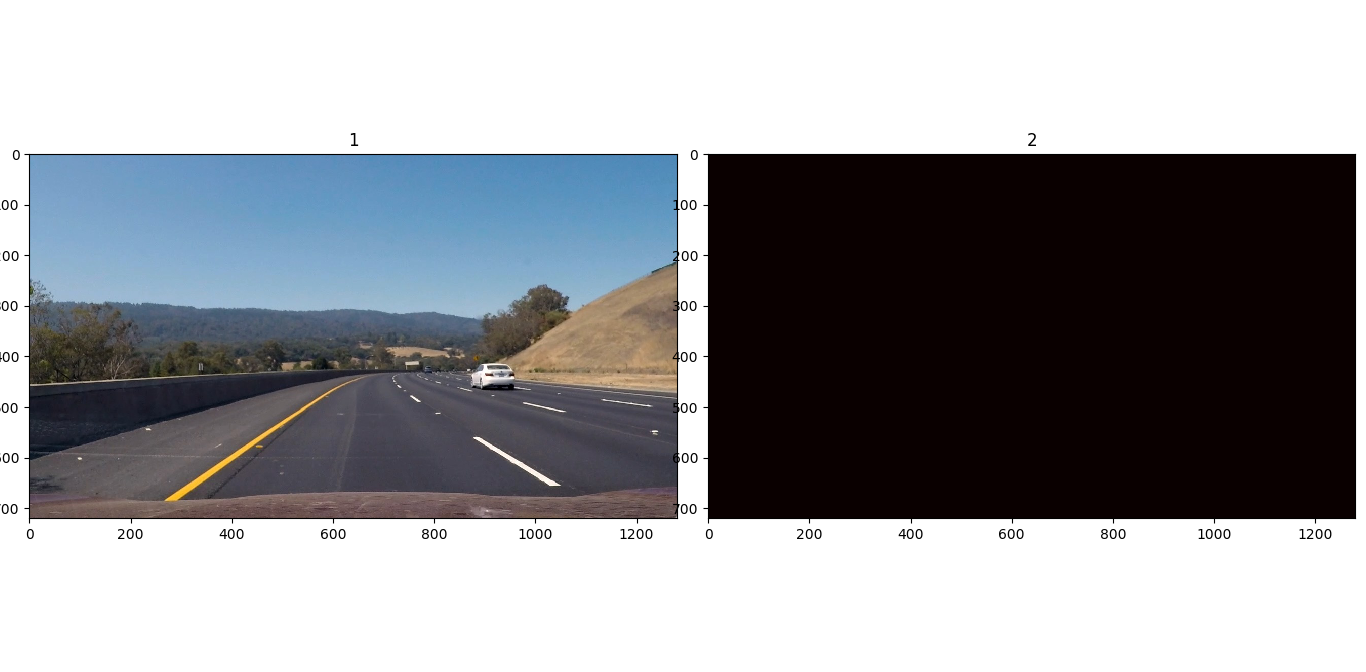
When I tried to increase the threshold for heatmap, this vehicle was not getting detected. On decreasing the threshold the other image were getting 1-2 false positives.
So, I tested various scales & xstops for optimal detection. Finally, I was able to detect that particular vechicle.